Next: 2 Creating a new Up: tuto Previous: Table of contents Contents
In this tutorial we will see how to model VTOL to horizontal flight transition. We consider a 5 meters span hybrid UAV, having 4 electric VTOL propellers, and a push propeller driven by a 2 strokes DA100L engine. We will make a RANS simulation of the hovering phase and another simulation in the middle of the transition with horizontal velocity, and check the forces equilibrium in these cases.
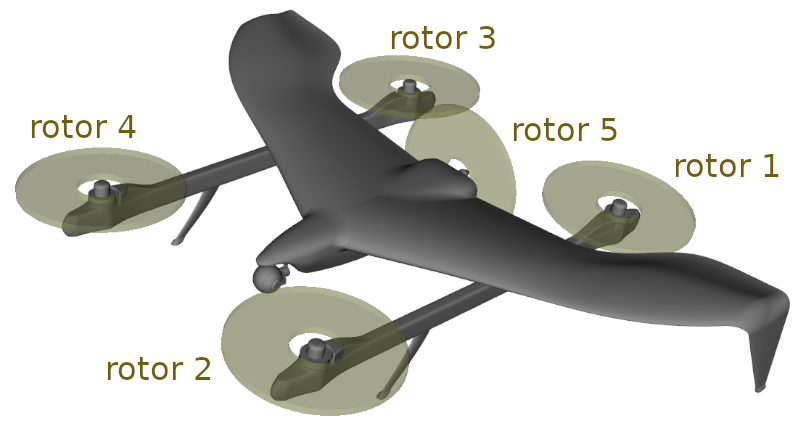
The geometry was simplified differently compared to the last tutorial. We will model the full span this time but the undercowl details were removed. All propellers will be modeled rotating. For that, we need to remove the blades from the CAD and replace them by disc shaped volumes. The flow in the cells contained in these volumes will be treated with a special model recreating the acceleration of the air normally generated by the blades.
Please find the stl files for all these parts in the ACE of Aircraft directory, in the compressed folder named "STLfiles.zip", or use this link : STLfiles.zip.
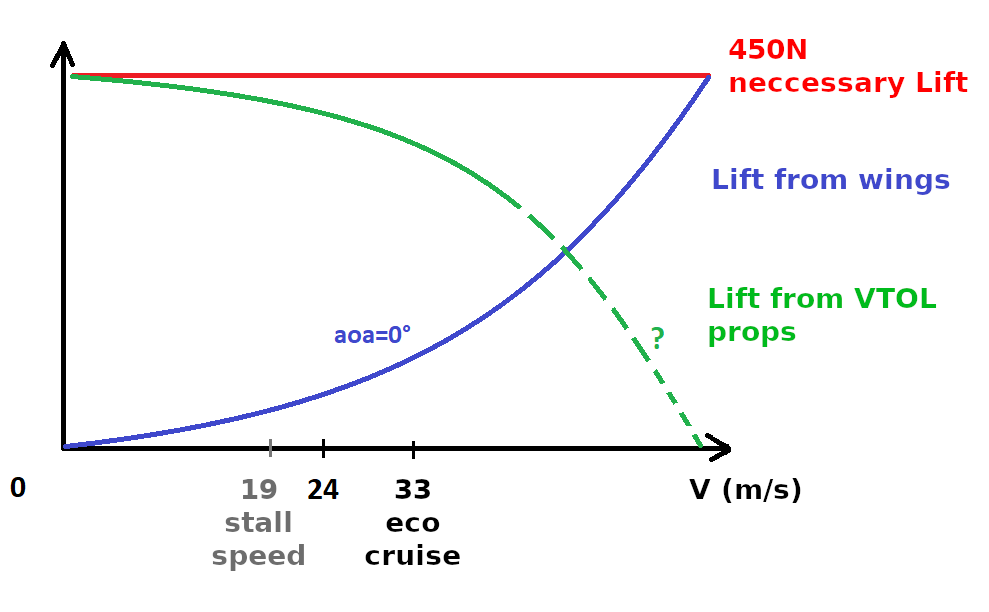
We will study the hovering to horizontal flight transition. The weight of this UAV is about 450N, and the stall speed is around 19 m/s. The economic cruise speed is around 33 m/s, but corresponds to an angle of attack of 3 °.
At the start of the transition the horizontal velocity is 0m/s and the VTOL propellers are near their maximum velocity to generate lift. The push propeller is also running to create a forward force and start the transition. In order to maintain altitude the total lift must be kept above 450N. As the UAV accelerates to the cruise speed, the lift from the wings and canards increase and the VTOL propeller lift can be decreased, as shown in the following image.
At the start of the transition the aerodynamic forces from the airframe are weak, too small to use elevators or ailerons to maneuver. The VTOL propellers are what drives the equilibrium.
At the end of the transition, when we are near the cruise speed, it is the opposite: the maneuvering surfaces are strong, but the VTOL propellers must now shut down.
The plan is to keep a 0° angle of attack until an horizontal velocity of 24 m/s is reached, then the aerodynamic surfaces can be used for control, set the appropriate angle of attack and maintain lift and quickly replace the VTOL propellers forces.
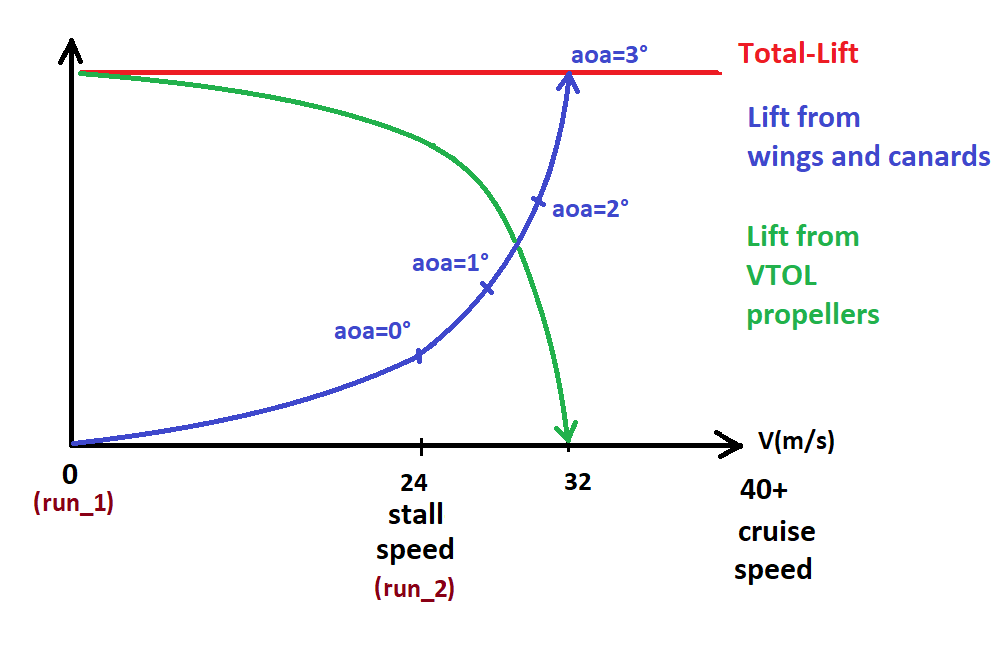
In this tutorial we will focus on just two points of this transition. We will make one run for the hovering state, at 0m/s horizontal speed. Then a second run at a speed of 24m/s in the middle of the transition. One important thing is to check that 450N of lift is able in all cases, and check the pitching momentum in each cases, because it may need to be adjusted with the elevator command.